Apollo 15 Stand-Up EVA
FULL VERSION with Music: Excerpts of Apollo 15 Commander Dave Scott's stand-up EVA audio are combined with visuals of the Hadley-Apennine region created from Lunar Reconnaissance Orbiter data.
Music provided by Universal Production Music: “Spread Our Wings” – Ben Beiny
Watch this video on the NASA Goddard YouTube channel.
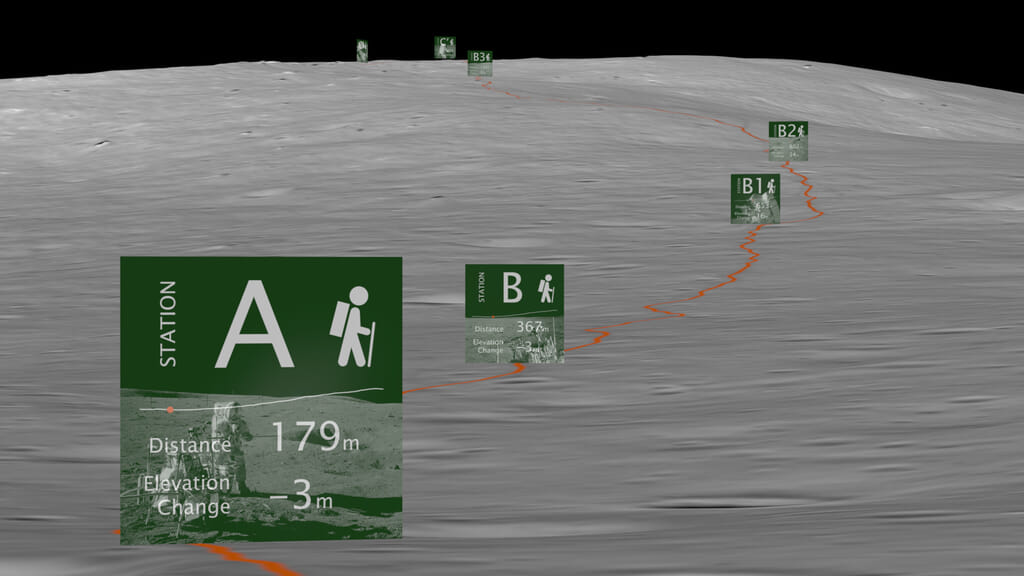
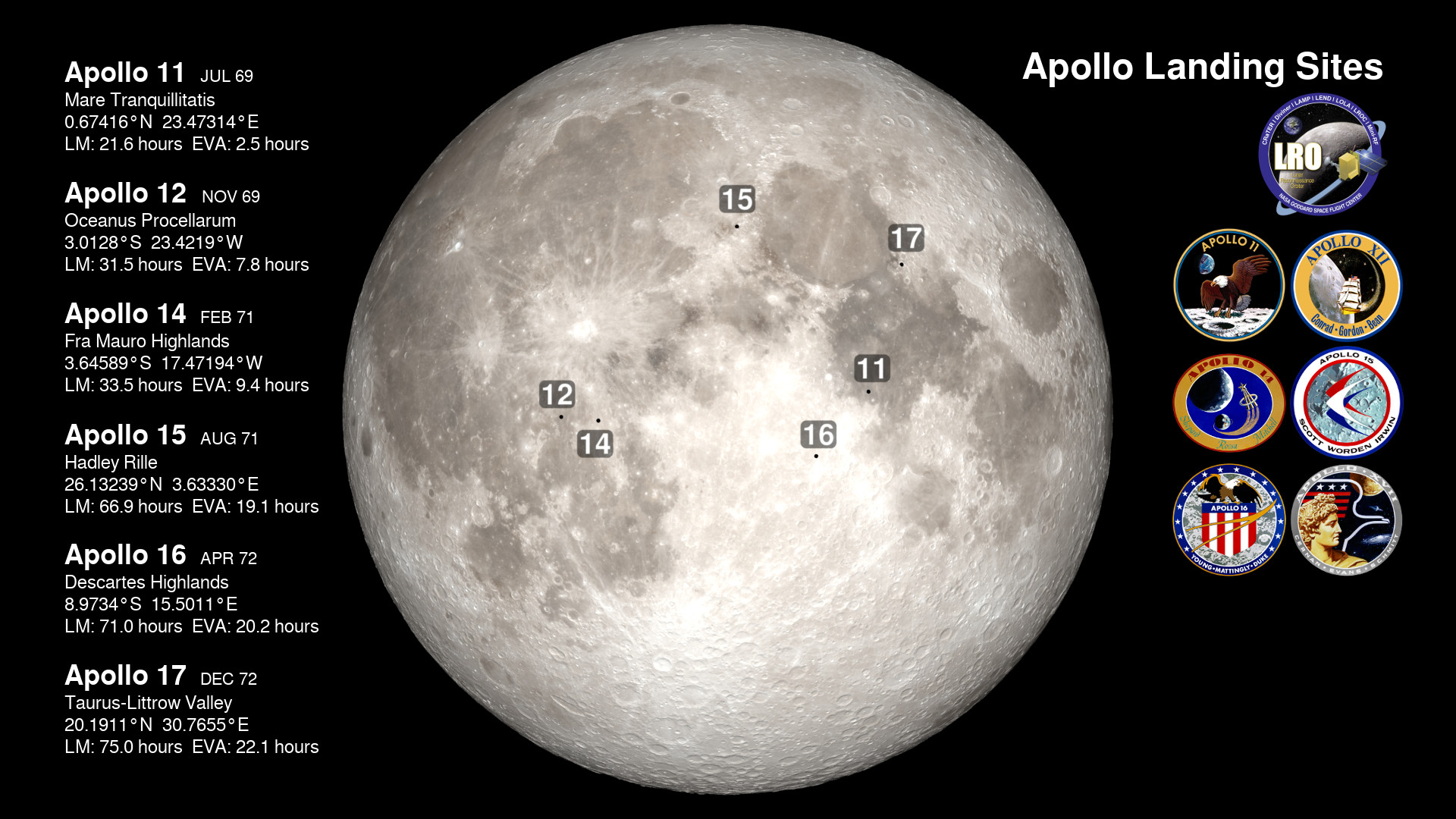
Apollo 15 landed on the Moon at 5:16 p.m. Houston time (22:16 UTC) on July 30, 1971. Two hours later, Commander Dave Scott and Lunar Module Pilot Jim Irwin depressurized the cabin of the Lunar Module and opened the top hatch. Scott then stood on the ascent engine cover, poked his head through the hatch, and for the next 25 minutes described and photographed the terrain of their landing site in the Hadley-Apennine region. This was the stand-up extravehicular activity (SEVA), an opportunity to quickly survey and report on the lunar landscape they'd be exploring over the next three days.
For the 50th anniversary of the Apollo 15 mission, the video presented here uses elevation maps and images from Lunar Reconnaissance Orbiter (LRO) to visualize the Hadley-Apennine terrain. The camera pans across the Apennine mountains and Hadley Rille that border the region, then flies low over the surface to features that were explored up-close by the astronauts. The visuals are matched to audio excerpts of Commander Scott's descriptions during the SEVA.
Because of its unique timing, Apollo 15 was the only mission to include a stand-up EVA. It was also the first of three missions to bring a lunar rover, an electric Moon car that allowed the astronauts to travel a total of 17 miles (28 km) and collect 170 pounds (77 kg) of samples.
Without music: Excerpts of Apollo 15 Commander Dave Scott's stand-up EVA audio are combined with visuals of the Hadley-Apennine region created from Lunar Reconnaissance Orbiter data.
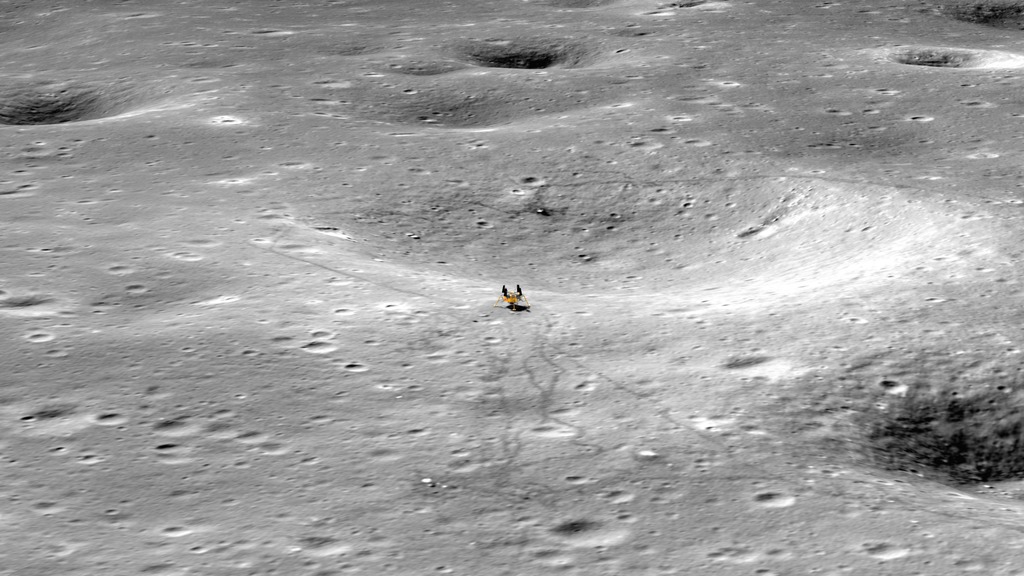
Pan: With the view centered on the landing site, the camera flies in a slow circle to show the features surrounding the lunar module. These include Mons Hadley to the northeast, 2.6 miles (4.1 kilometers) above the plain; Mons Hadley Delta to the south; St. George, a large crater in the side of Hadley Delta; Hadley Rille, 600 feet (200 meters) deep; Bennett Hill; Hill 305; the south secondary crater complex; and Pluton crater.
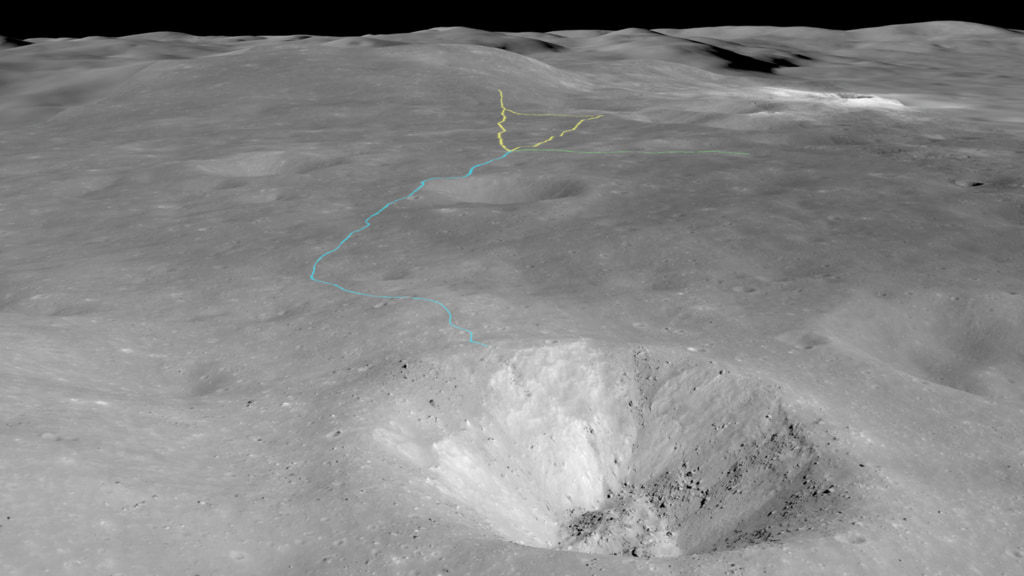
St. George: The camera flies over the surface and across Hadley Rille toward St. George crater.
South Complex: The camera flies across the surface toward the south secondary crater complex, which is initially hidden behind a shallow ridge.
Credits
Please give credit for this item to:
NASA's Scientific Visualization Studio
Music provided by Universal Production Music: "Spread Our Wings" – Ben Beiny
-
Visualizer
-
Ernie Wright
(USRA)

-
Ernie Wright
(USRA)
-
Producer
- David Ladd (Advocates in Manpower Management, Inc.)
-
Video editor
- David Ladd (Advocates in Manpower Management, Inc.)
-
Scientist
-
Noah Petro
(NASA/GSFC)
-
Noah Petro
(NASA/GSFC)
-
Technical support
- Laurence Schuler (ADNET Systems, Inc.)
- Ian Jones (ADNET Systems, Inc.)
Missions
This page is related to the following missions:Series
This page can be found in the following series:Datasets used
-
NAC (Narrow Angle Camera) [LRO: LROC]
ID: 652 -
Stereo DEM [LRO: LROC NAC]
ID: 835 -
LROC WAC [LRO: Wide Angle Camera]
ID: 927 -
SLDEM2015 (DIgital Elevation Model) [LRO/SELENE: LOLA/TC]
ID: 948A digital elevation model of the Moon derived from the Lunar Orbiter Laser Altimeter and the SELENE Terrain Camera. See the description in Icarus. The data is here.
See all pages that use this dataset
Note: While we identify the data sets used on this page, we do not store any further details, nor the data sets themselves on our site.
Related
- ID: 4989
 Visualization
Visualization - ID: 4883
 Visualization
Visualization - ID: 4791
 Visualization
Visualization - ID: 4767
 Visualization
Visualization - ID: 4731
 Visualization
Visualization - ID: 4185
 Visualization
Visualization
Release date
This page was originally published on Friday, July 30, 2021.
This page was last updated on Sunday, February 2, 2025 at 12:15 AM EST.