How LRO Will Find Safe Landing Sites on the Moon - Stereoscopic Version
In general, good landing sites need to be level and free from large boulders that could damage or tip the spacecraft as it attempts to land. And it's up to the Lunar Reconaissance Orbiter (LRO) mission to make those landings as safe as possible.
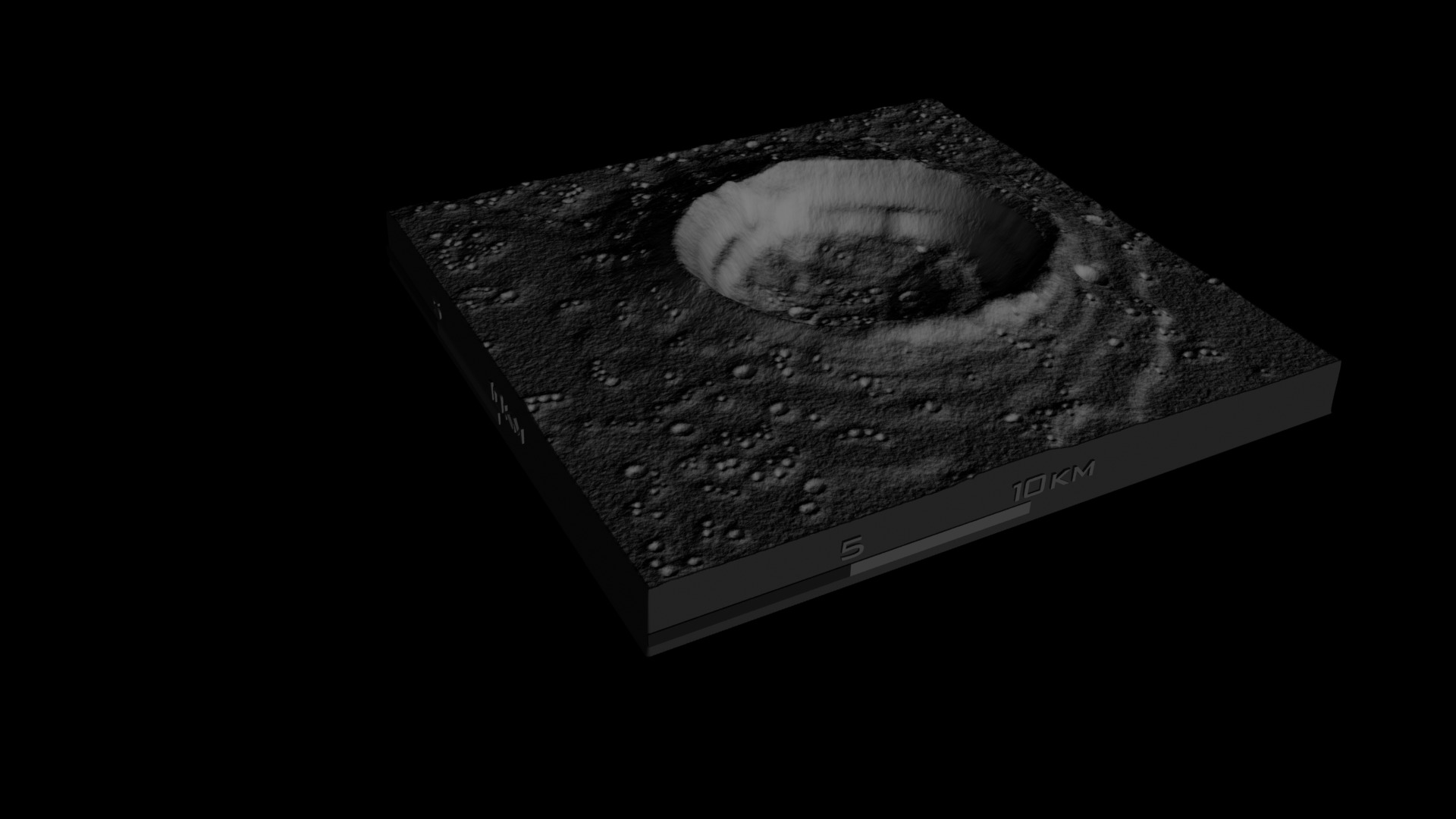
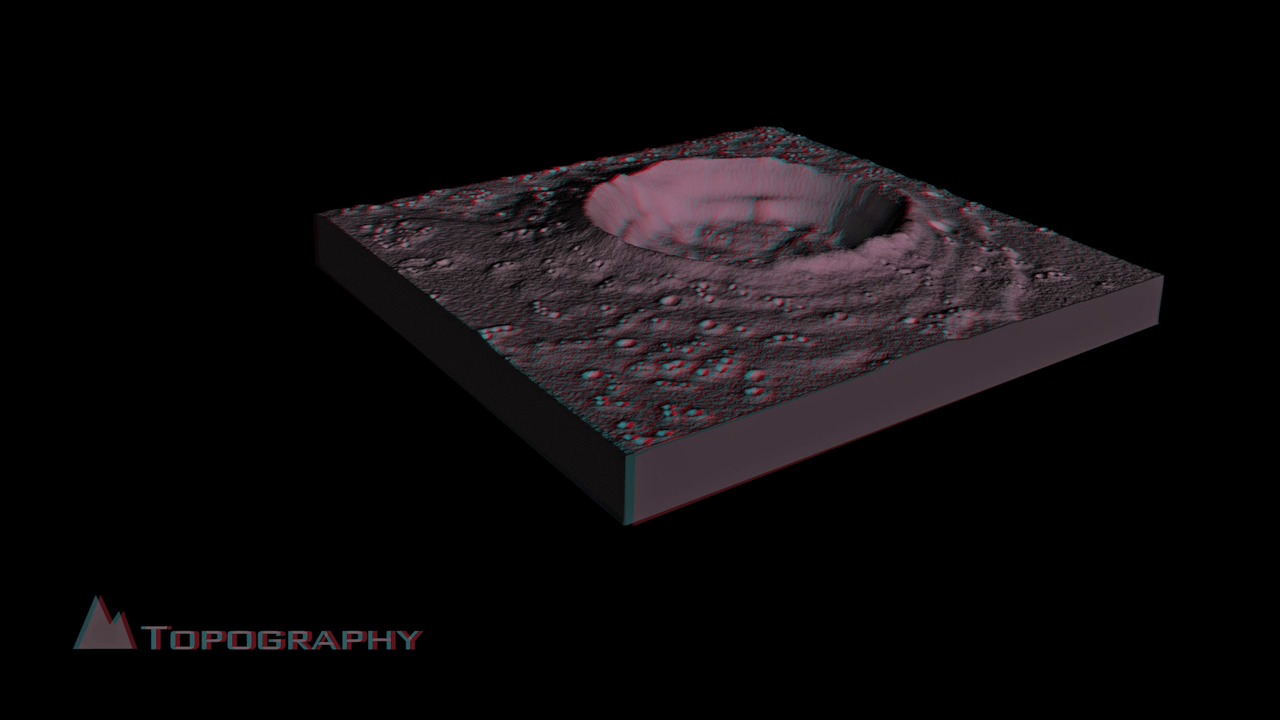
Astronauts will want to avoid places with steep slopes that could tip the spacecraft, so LRO includes a laser ranging system that will build an elevation map to show the contours of the polar surface. The instrument, called the Lunar Orbiter Laser Altimeter (LOLA ), records the time it takes for a laser pulse to travel from the spacecraft to the lunar surface and back to calculate the height of the lunar terrain. After a year in orbit aboard LRO, LOLA will have created an elevation map of the polar regions that is accurate to within a half-meter (20 inches) vertically and 50 meters (about 160 feet) horizontally.
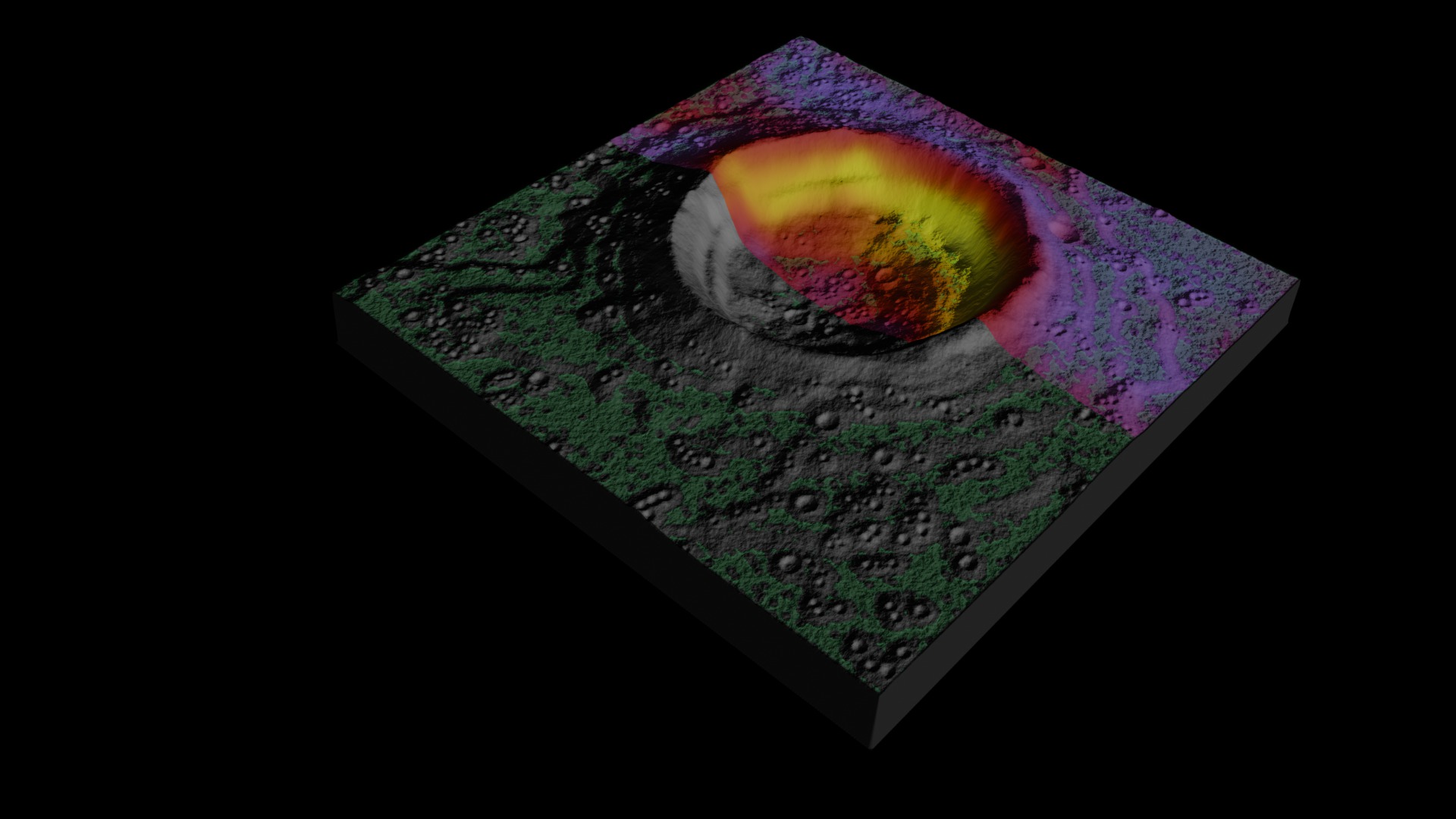
LRO will also use data from another instrument that measures temperatures to double-check the safe zone map. Temperatures change more rapidly in areas with loose materials (lots of rocks). By analyzing how quickly temperatures change in potential landing zones, planners using the instrument, named Diviner, can rule out areas that appear smooth but actually are likely to be rocky.
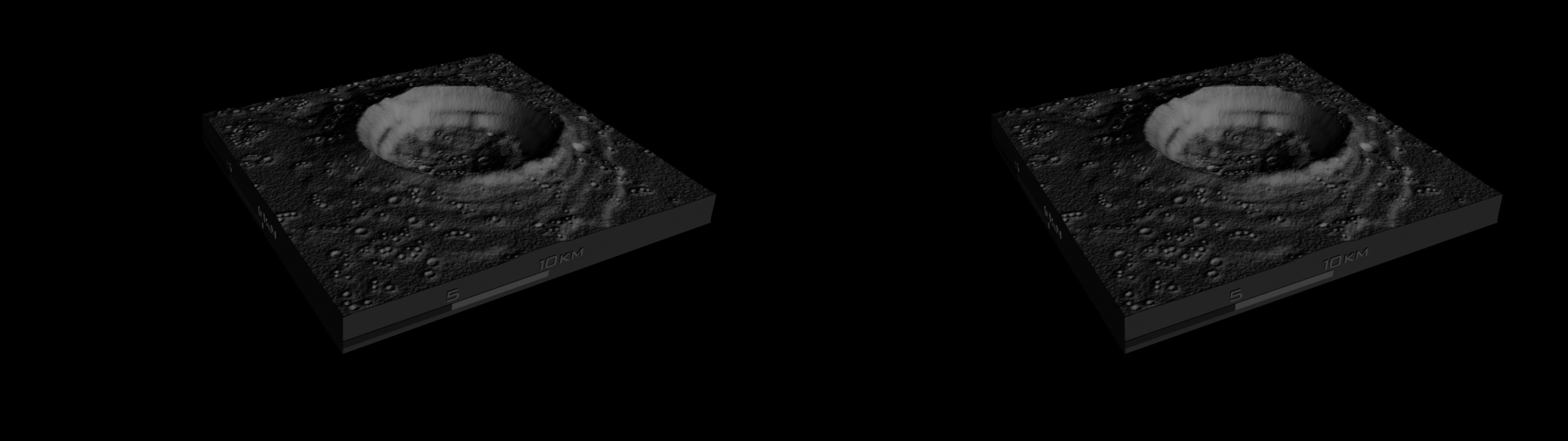
LRO also carries a pair of eagle-eyed cameras, called the Narrow Angle Cameras (NACs) which together can take images that reveal details as small as a half-meter (almost 20 inches) over swaths 10 kilometers (about 6.2 miles) wide. As LRO orbits over the poles, the moon rotates beneath the spacecraft, and the NACs will gradually build up a detailed picture of the region. It will be used to identify safe landing zones free of large boulders and craters, allowing astronauts to avoid surprises like Apollo 11.
LRO is being assembled and managed by NASA Goddard, and is scheduled to be launched in early 2009. NASA plans to have astronauts back on the moon by 2020. As astronauts close in on a new landing site late in the next decade, they can thank NASA Goddard's small robot scout for showing the safest approach.
This visualization is a modified stereoscopic version of: #3533: How LRO Will Find Safe Landing Sites on the Moon
The modifications applied in the production of the stereoscopic visualization include: extension of the time range of the animation, color adjustments, scale bar and text overlay treatment.
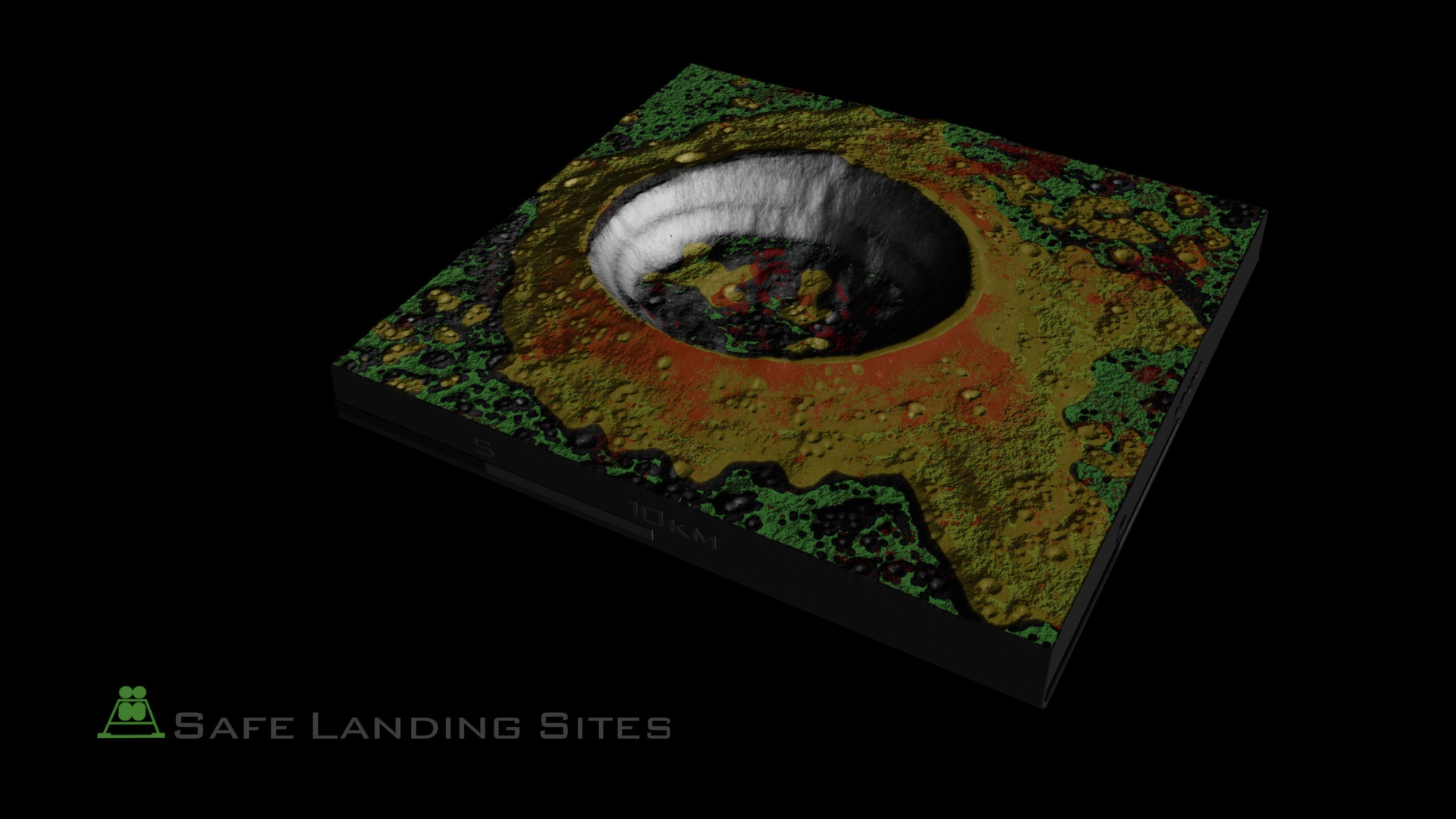
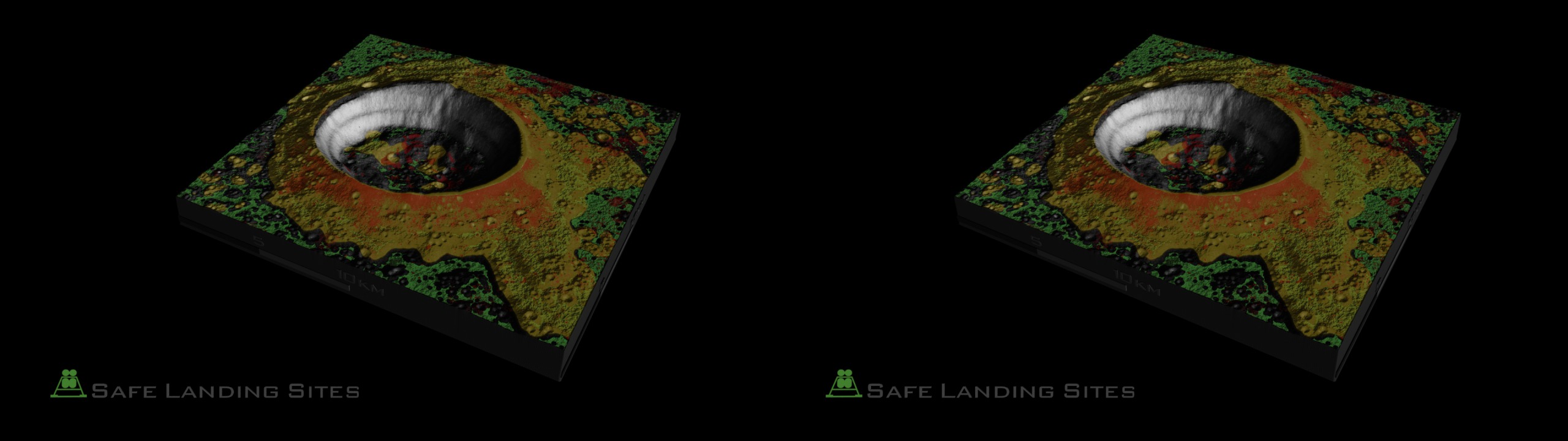
The crater depicted in this visualization is ficticious and only intended for illustrative purposes. The visualization begins with the reveal of a digital elevation map showing sample lunar topography illustrating the kind of data that LRO's LOLA instrument will collect. From this topographic data level surface areas can be derived as the first step to determining safe landing sites. Next, an example temperature map of the lunar surface is revealed to show the sort of data Diviner will collect. Changes in surface temperature will help determine small rock hazards, since they retain and release heat at a different rate than the surrounding regolith. Large rock hazards can be found with LROC's surface imagery. Finally, removing rock hazard areas from level surface areas reveals potential safe landing sites for future lunar missions.
In this page the visualization content is offered in various modes to accomodate different types of stereoscopic viewing, such as: Left and Right Eye separate, and Left and Right Eye side-by-side combined on the same frame.


For More Information
http://history.nasa.gov/alsj/a11/a11.landing.html
http://lroc.sese.asu.edu/mission.html
http://www.lpi.usra.edu/lunar/missions/apollo/apollo_11/landing_site/
http://www.nasa.gov/mission_pages/LRO/news/safe_landing.html
Visualization Credits
Alex Kekesi (Global Science and Technology, Inc.): Animator
Greg Shirah (NASA/GSFC): Animator
Helen-Nicole Kostis (UMBC): Producer
Wade Sisler (NASA/GSFC): Producer
Andrew Freeberg (NASA/GSFC): Producer
John Keller (NASA/GSFC): Scientist
William Steigerwald (NASA/GSFC): Writer
NASA/Goddard Space Flight Center Scientific Visualization Studio Reference DEM data provided by: Jay Friedlander (QSS, Code 672)
https://svs.gsfc.nasa.gov/3567
Mission:
LRO (Lunar Reconnaissance Orbiter)
Data Used:
LRO/Diviner
This item is part of this series:
LRO - Animations
Keywords:
SVS >> HDTV
SVS >> Lunar
SVS >> Moon
SVS >> Stereo Display
SVS >> Lunar Reconnaissance Orbiter
SVS >> For Educators
SVS >> Lunar Topography
SVS >> Lunar Surface Temperature
SVS >> Elevation Map
NASA Science >> Planets and Moons



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}