Planets and Moons
ID: 4720
These color and elevation maps are designed for use in 3D rendering software. They are created from data assembled by the Lunar Reconnaissance Orbiter camera and laser altimeter instrument teams.
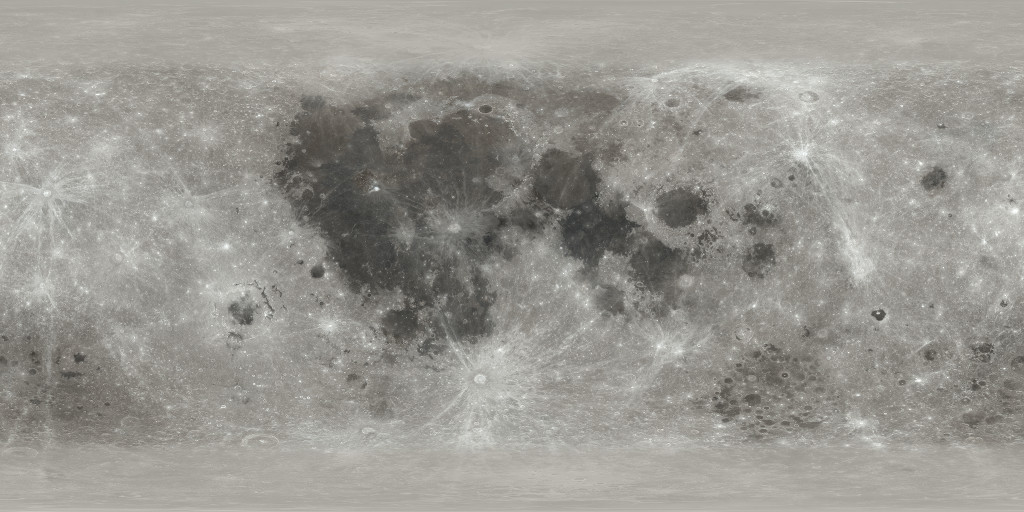
The color map was adapted from the Hapke Normalized WAC Mosaic, a composite built by the camera team from over 100,000 WAC (Wide Angle Camera) images. The readme file provides a technical summary of how the mosaic was constructed along with references to more detailed publications. A less formal introduction to the process is in this LROC blog post and in this one.
For the color map here, the visualizer modified and combined three of the seven wavelength bands of the LROC color data to more closely match what the human eye sees. The red channel contains the 643 nm band, while green and blue were created from different linear combinations of the 566 and 415 nm bands to more nearly center them on 532 nm (green) and 472 nm (blue). A gamma of 2.8 was applied (the LROC data is linear), and the channels were multiplied by (0.935, 1.005, 1.04) to balance the color. The intensity range (0.16, 0.4) was mapped into the full (0, 255) 8-bit range per channel. Small data dropouts near the top and bottom were inpainted using Photoshop's content-aware spot healing brush.
The source data covers the lunar globe from 70°N to 70°S. Because the Moon's axial and orbital tilts are both small, many areas outside these latitudes remain shrouded in shadow, even after thousands of passes by LRO's camera, so they are left out of the LROC mosaic. For this color map, the missing latitudes were filled in with a combination of monochromatic LROC data and an albedo map (LDAM) from LRO's laser altimeter. When rendered with realistic shadows, these parts of the map aren't particularly visible, and while they comprise more than 20% of the map's pixels, they represent only 6% of the Moon's surface.
This image is optimized for aesthetics, not science. Scientific applications should use the source data.
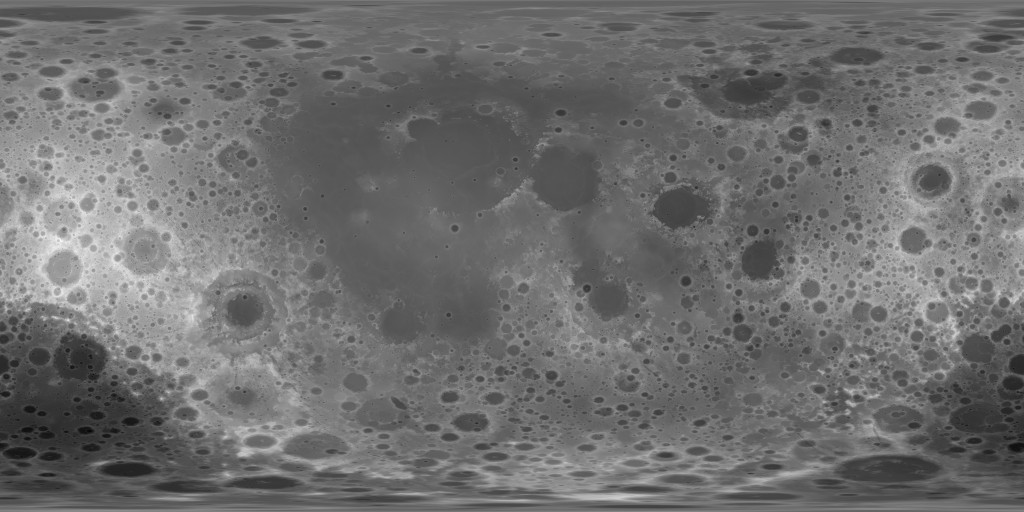
The displacement map (also known as a height map or elevation map) was taken directly from the latest (as of spring 2019) gridded data products of the Lunar Orbiter Laser Altimeter instrument team. LOLA data is archived on the Geosciences Node of the Planetary Data System. A small subset of the LOLA data stored there, the global cylindrical projections at 4, 16, and 64 pixels per degree, has been reformatted here as uncompressed TIFF files, in vertical units of either floating-point kilometers or 16-bit unsigned integer half-meters.
The reference surface for all LRO data is a sphere of radius 1737.4 km. LOLA's gridded elevation data is published as signed 16-bit integers in units of half-meters relative to this radius. For the floating-point TIFFs, the source data was divided by 2000. For the unsigned 16-bit TIFFs, the source data was offset by +20,000 (10 km) so that all of the values are positive. This latter format is provided for software that doesn't work well with either floating-point or signed integer files.
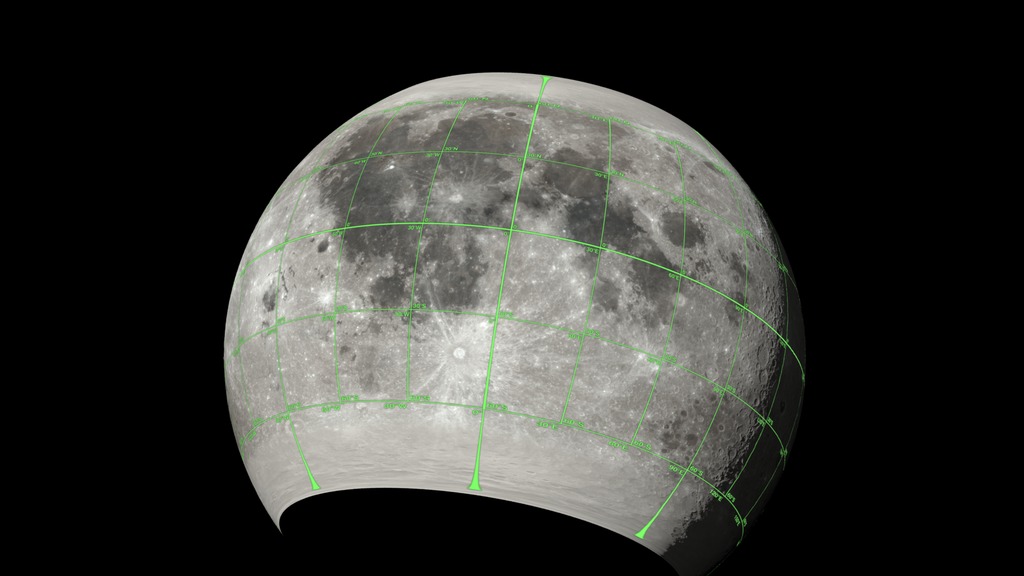
Within 3D animation software, an object like the Moon begins as a simple geometric shape, in this case a sphere. Texture maps like the ones on this page are used to add detail to the model. The color map tells the software how to paint the surface, and the displacement map tells it how to add the shape details that define the lunar terrain. Without them, the Moon model is just a smooth, monochrome ball. Although these maps are flat rectangles, the software understands them as maps of a spherical surface and knows how to warp them onto spherical geometry.
Each pixel in these texture maps corresponds to a point on the lunar surface defined by a longitude-latitude pair. Pixels in the color map contain the
As of this writing, the best global-scale elevation data for equatorial and mid-latitude regions of the Moon, at resolutions up to 512 pixels per degree, is SLDEM2015. For regions near the poles, where the density of laser shots is much higher, the GDR data in polar stereo projection reaches resolutions of five meters per pixel.
The LROC narrow-angle camera (NAC) has imaged most of the Moon's surface at a resolution of one meter per pixel or better. LROC imagery can be explored graphically using its Quickmap interface and searched on its RDR Product Select page. Of particular interest are the Topographic Products (menu option in the upper left of the page), which are matched with high-resolution DEMs derived from stereo image pairs. This dataset includes all of the Apollo landing sites and dozens of other locations of interest.
CGI Moon Kit
Color
For the color map here, the visualizer modified and combined three of the seven wavelength bands of the LROC color data to more closely match what the human eye sees. The red channel contains the 643 nm band, while green and blue were created from different linear combinations of the 566 and 415 nm bands to more nearly center them on 532 nm (green) and 472 nm (blue). A gamma of 2.8 was applied (the LROC data is linear), and the channels were multiplied by (0.935, 1.005, 1.04) to balance the color. The intensity range (0.16, 0.4) was mapped into the full (0, 255) 8-bit range per channel. Small data dropouts near the top and bottom were inpainted using Photoshop's content-aware spot healing brush.
The source data covers the lunar globe from 70°N to 70°S. Because the Moon's axial and orbital tilts are both small, many areas outside these latitudes remain shrouded in shadow, even after thousands of passes by LRO's camera, so they are left out of the LROC mosaic. For this color map, the missing latitudes were filled in with a combination of monochromatic LROC data and an albedo map (LDAM) from LRO's laser altimeter. When rendered with realistic shadows, these parts of the map aren't particularly visible, and while they comprise more than 20% of the map's pixels, they represent only 6% of the Moon's surface.
This image is optimized for aesthetics, not science. Scientific applications should use the source data.
Displacement
The reference surface for all LRO data is a sphere of radius 1737.4 km. LOLA's gridded elevation data is published as signed 16-bit integers in units of half-meters relative to this radius. For the floating-point TIFFs, the source data was divided by 2000. For the unsigned 16-bit TIFFs, the source data was offset by +20,000 (10 km) so that all of the values are positive. This latter format is provided for software that doesn't work well with either floating-point or signed integer files.
How These Maps Are Used
Each pixel in these texture maps corresponds to a point on the lunar surface defined by a longitude-latitude pair. Pixels in the color map contain the
base colorof the surface, before applying the effects of varying light and camera angles (called incidence angle i and emission angle e in the technical description). Pixels in the displacement map contain the height of the surface at the corresponding locations.
More Data
These maps are a tiny subset of the data publicly archived by the LRO instrument teams. All of the data is in standard and fairly simple PDS file formats (files with.IMGfilename extensions). Although not typically supported by general-purpose computer graphics software, these formats are directly readable by some GIS programs. The data formats are documented in PDS labels, which are either separate text files with a
.LBLfilename extension or embedded as fixed-length headers. Other than the possible header, most .IMG files are uncompressed 2D binary arrays of numbers. Some data is also available in TIFF or JPEG2000 formats.
As of this writing, the best global-scale elevation data for equatorial and mid-latitude regions of the Moon, at resolutions up to 512 pixels per degree, is SLDEM2015. For regions near the poles, where the density of laser shots is much higher, the GDR data in polar stereo projection reaches resolutions of five meters per pixel.
The LROC narrow-angle camera (NAC) has imaged most of the Moon's surface at a resolution of one meter per pixel or better. LROC imagery can be explored graphically using its Quickmap interface and searched on its RDR Product Select page. Of particular interest are the Topographic Products (menu option in the upper left of the page), which are matched with high-resolution DEMs derived from stereo image pairs. This dataset includes all of the Apollo landing sites and dozens of other locations of interest.
Visualization Credits
Please give credit for this item to:
NASA's Scientific Visualization Studio
NASA's Scientific Visualization Studio
Short URL to share this page:
https://svs.gsfc.nasa.gov/4720
Data Used:
Note: While we identify the data sets used in these visualizations, we do not store any further details nor the data sets themselves on our site.
Keywords:
SVS >> Albedo
SVS >> HDTV
SVS >> Laser Altimeter
SVS >> Mosaic
SVS >> Hyperwall
SVS >> LRO
SVS >> Lunar Reconnaissance Orbiter
SVS >> LOLA
SVS >> LROC
SVS >> Elevation Map
NASA Science >> Planets and Moons
SVS >> Map
https://svs.gsfc.nasa.gov/4720
Data Used:
LRO/LOLA/Digital Elevation Map also referred to as: DEM
Lunar Reconnaissance Orbiter/LRO Camera/Natural Color Hapke Normalized WAC Mosaic also referred to as: LROC WAC Color Mosaic
Mosaic - Arizona State University
This natural-color global mosaic is based on the 'Hapke normalized' mosaic from LRO's wide-angle camera. The data has been gamma corrected, white balanced, and range adjusted to more closely match human vision.
Keywords:
SVS >> Albedo
SVS >> HDTV
SVS >> Laser Altimeter
SVS >> Mosaic
SVS >> Hyperwall
SVS >> LRO
SVS >> Lunar Reconnaissance Orbiter
SVS >> LOLA
SVS >> LROC
SVS >> Elevation Map
NASA Science >> Planets and Moons
SVS >> Map



{kind=link}